
Wikimedia Commons (CC)
#001
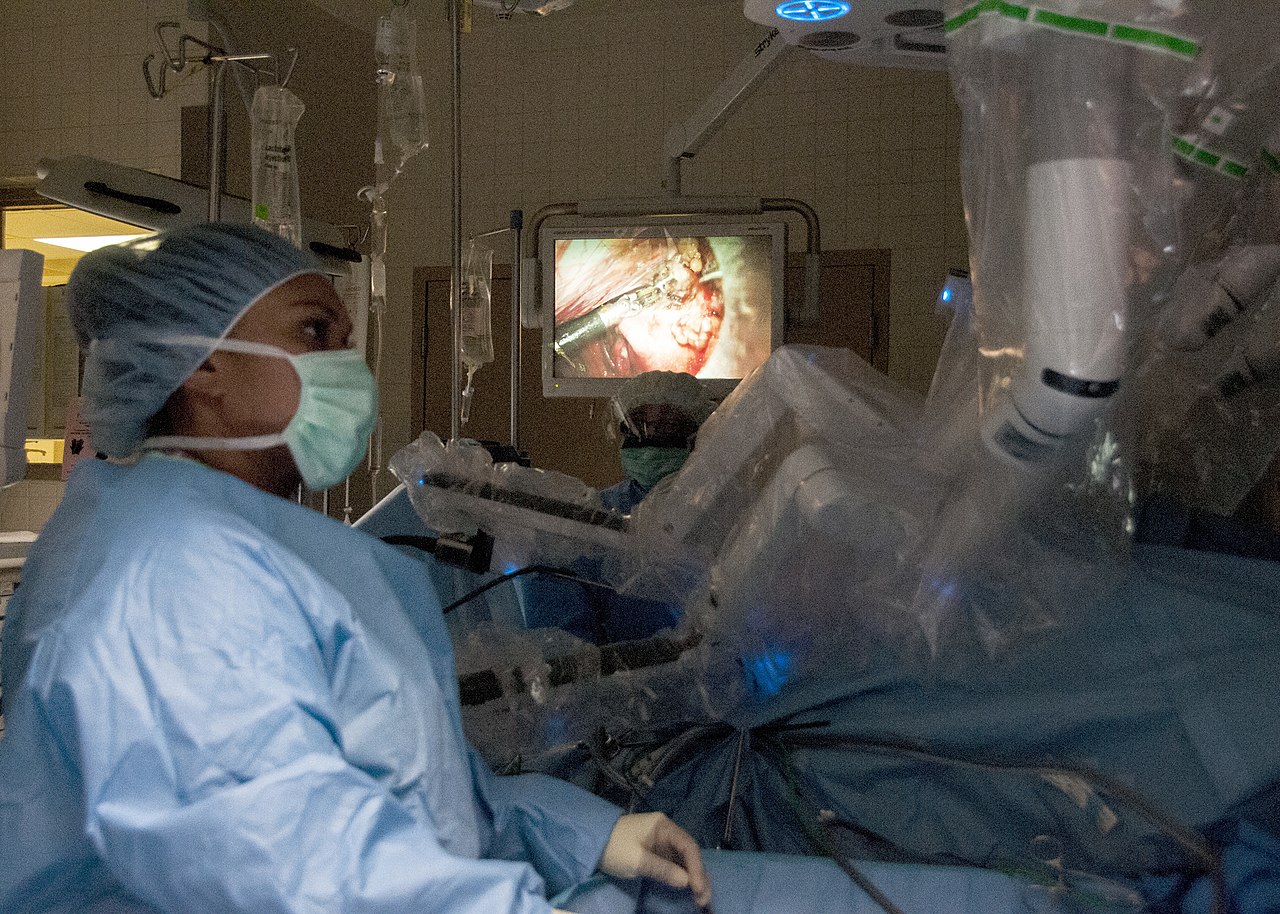
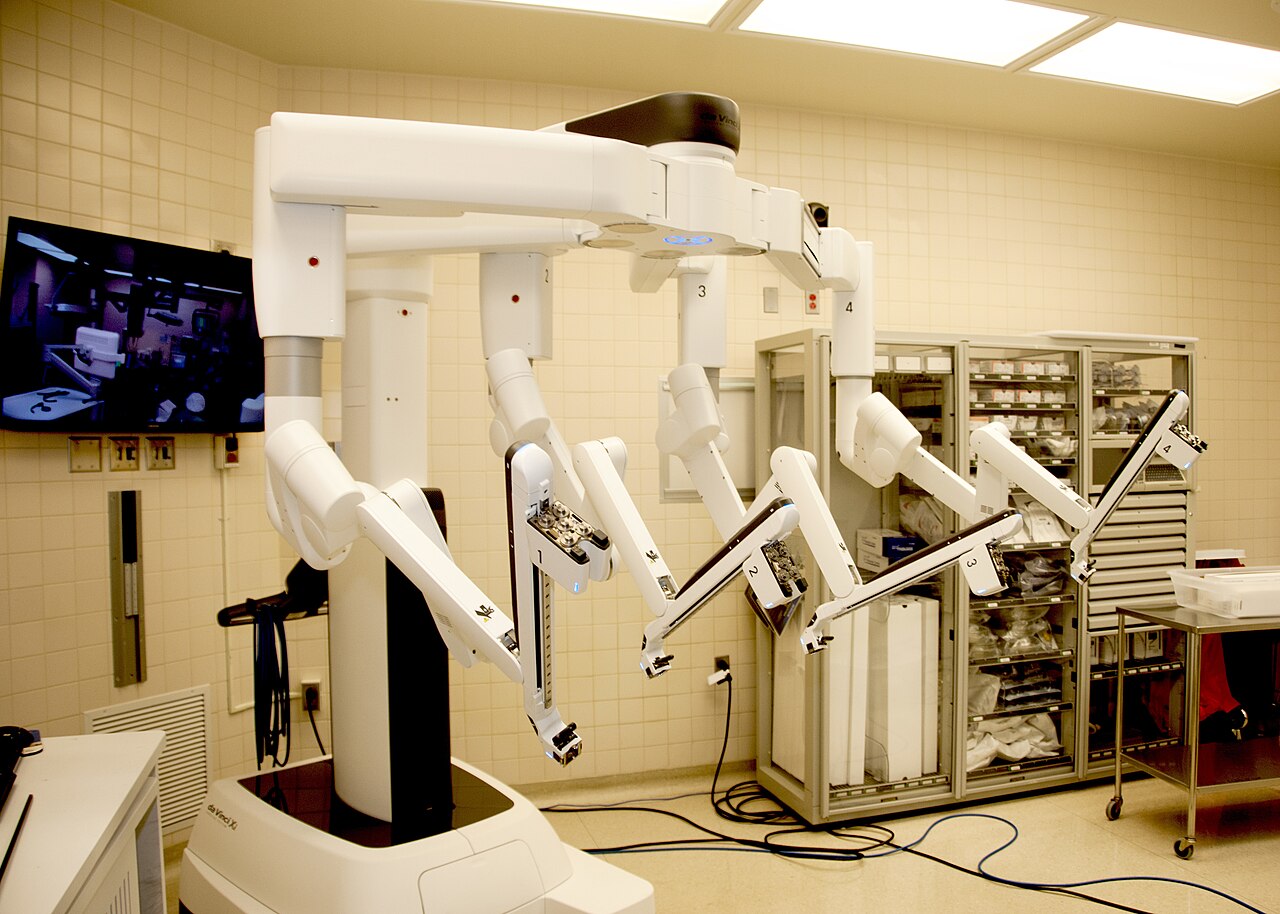
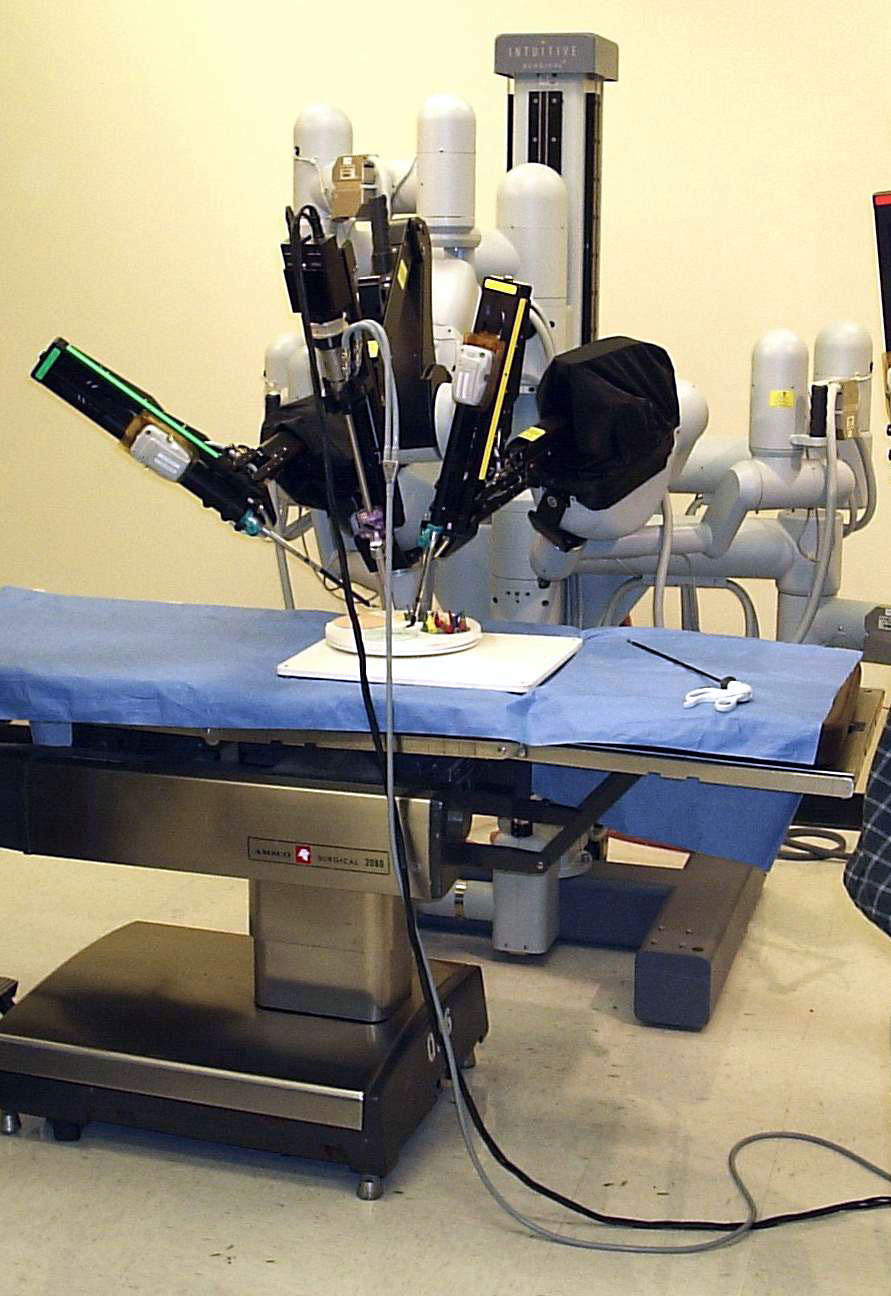
Histoire et principes du robot da Vinci (Xi, SP)
- Le robot da Vinci n'est pas autonome : c'est un système maître-esclave télémanipulé. Le chirurgien contrôle chaque geste depuis la console.
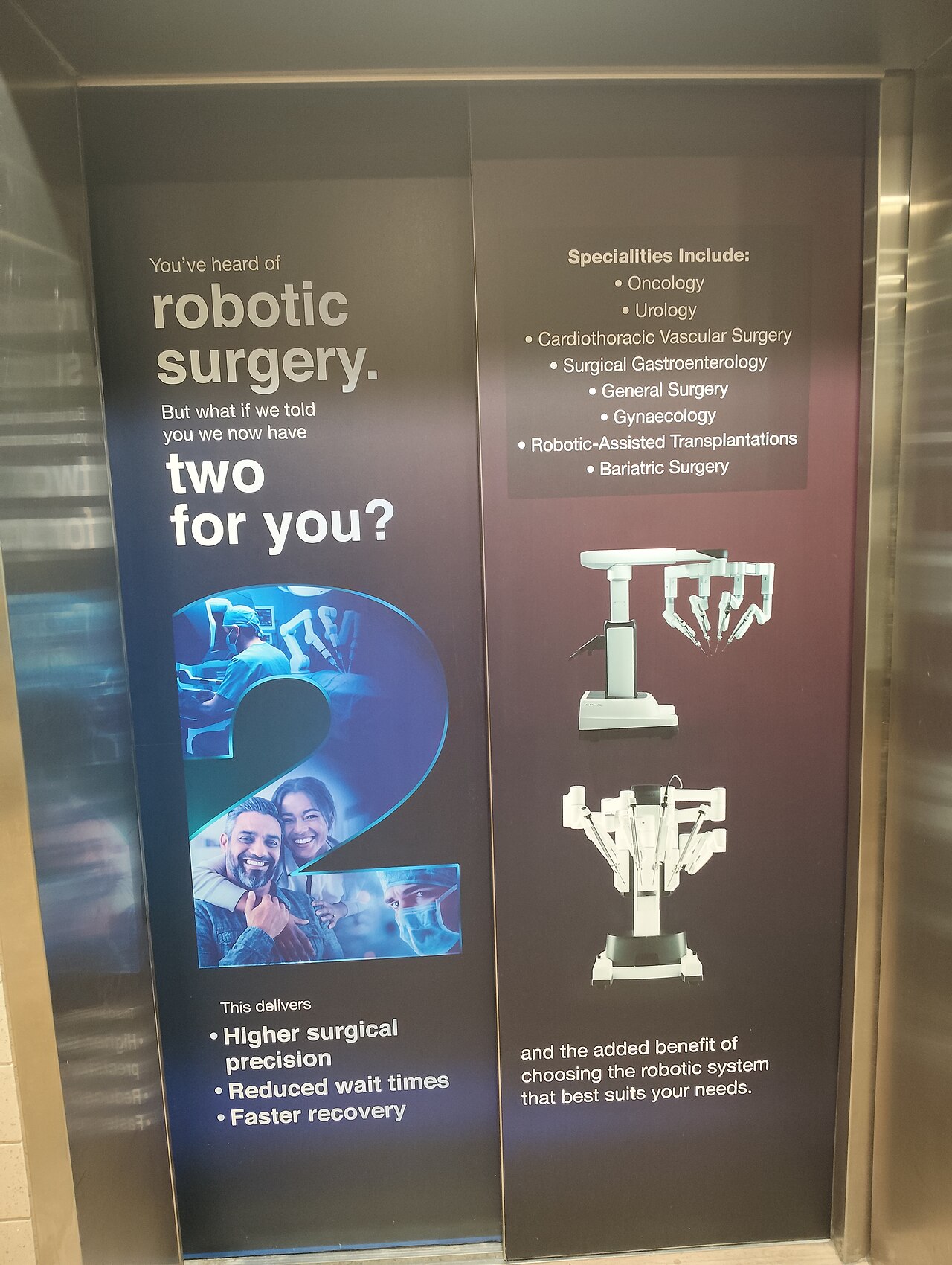
- Historique : développé initialement par la DARPA pour la chirurgie à distance, commercialisé par Intuitive Surgical depuis 2000. Plus de 10 millions d'interventions réalisées dans le monde.
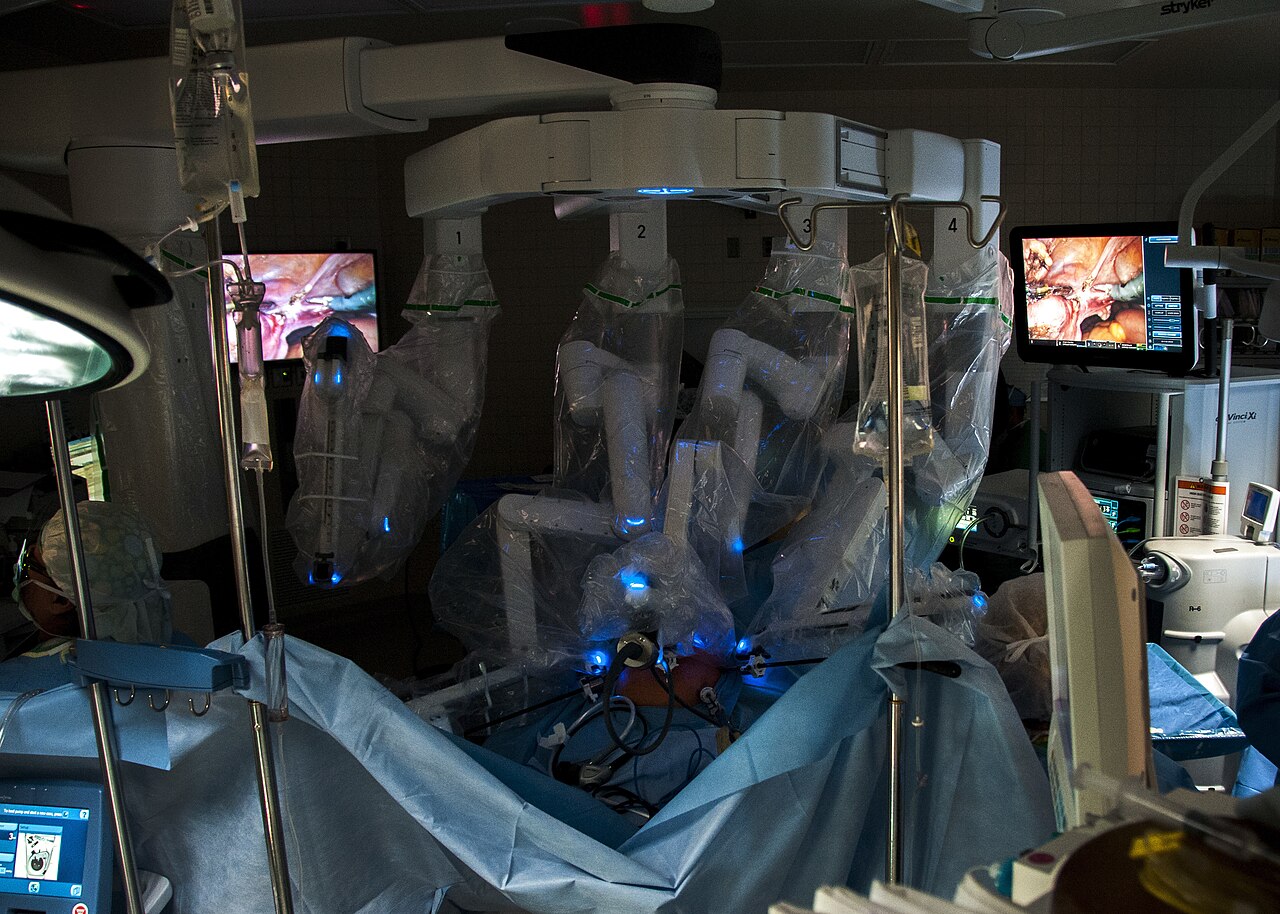
- Composants : console chirurgien (vision 3D, manipulation), chariot patient (4 bras articulés), colonne vidéo (insufflation CO₂, énergie).
- Modèles : da Vinci Si (2009), Xi (2014, bras plus fins, docking simplifié, multiquadrant), SP (Single Port, 2018, un seul trocart de 25 mm).
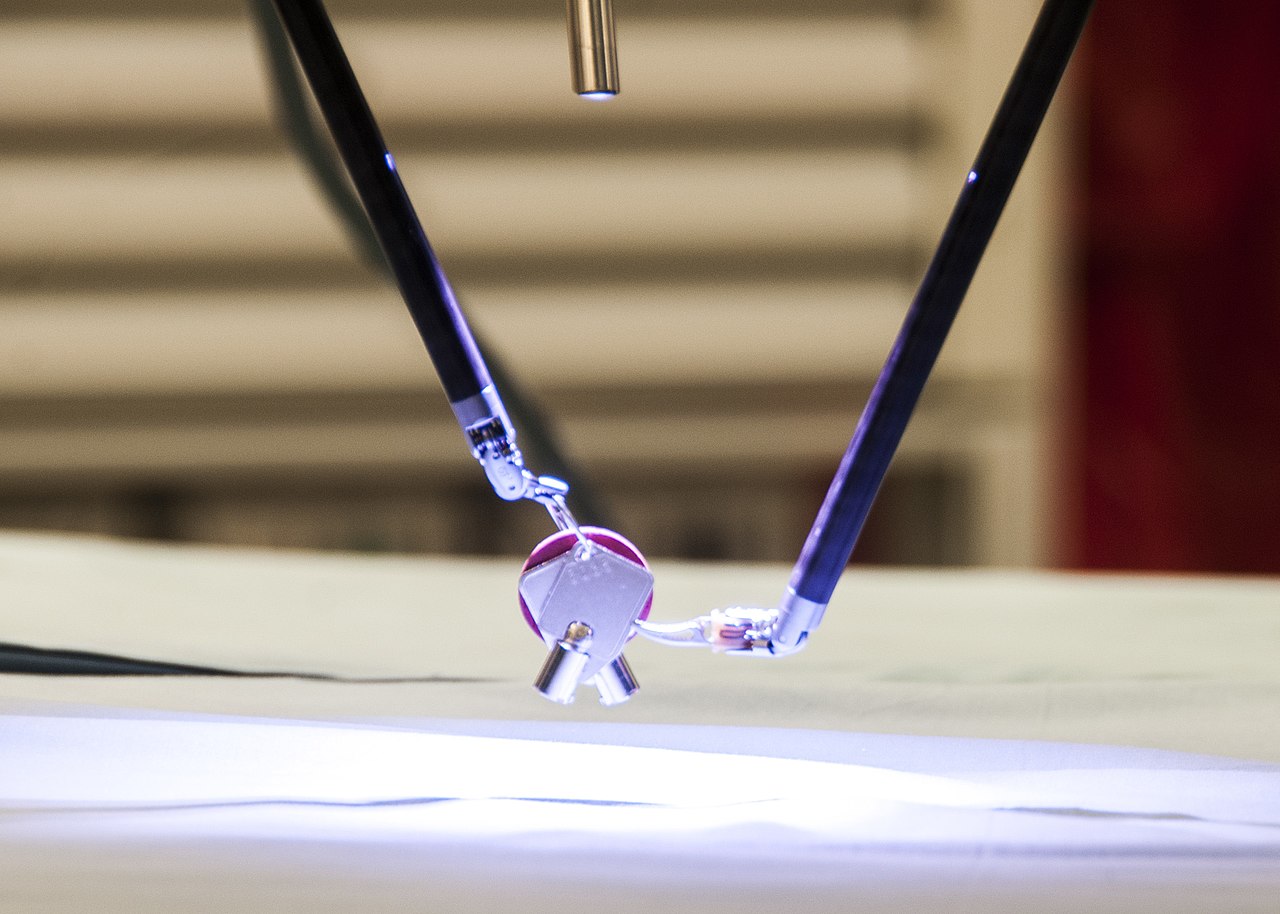
- Avantages mécaniques : instruments EndoWrist avec 7 degrés de liberté (vs 4 en coelioscopie), filtrage du tremblement, mise à l'échelle des mouvements (2:1 à 5:1).
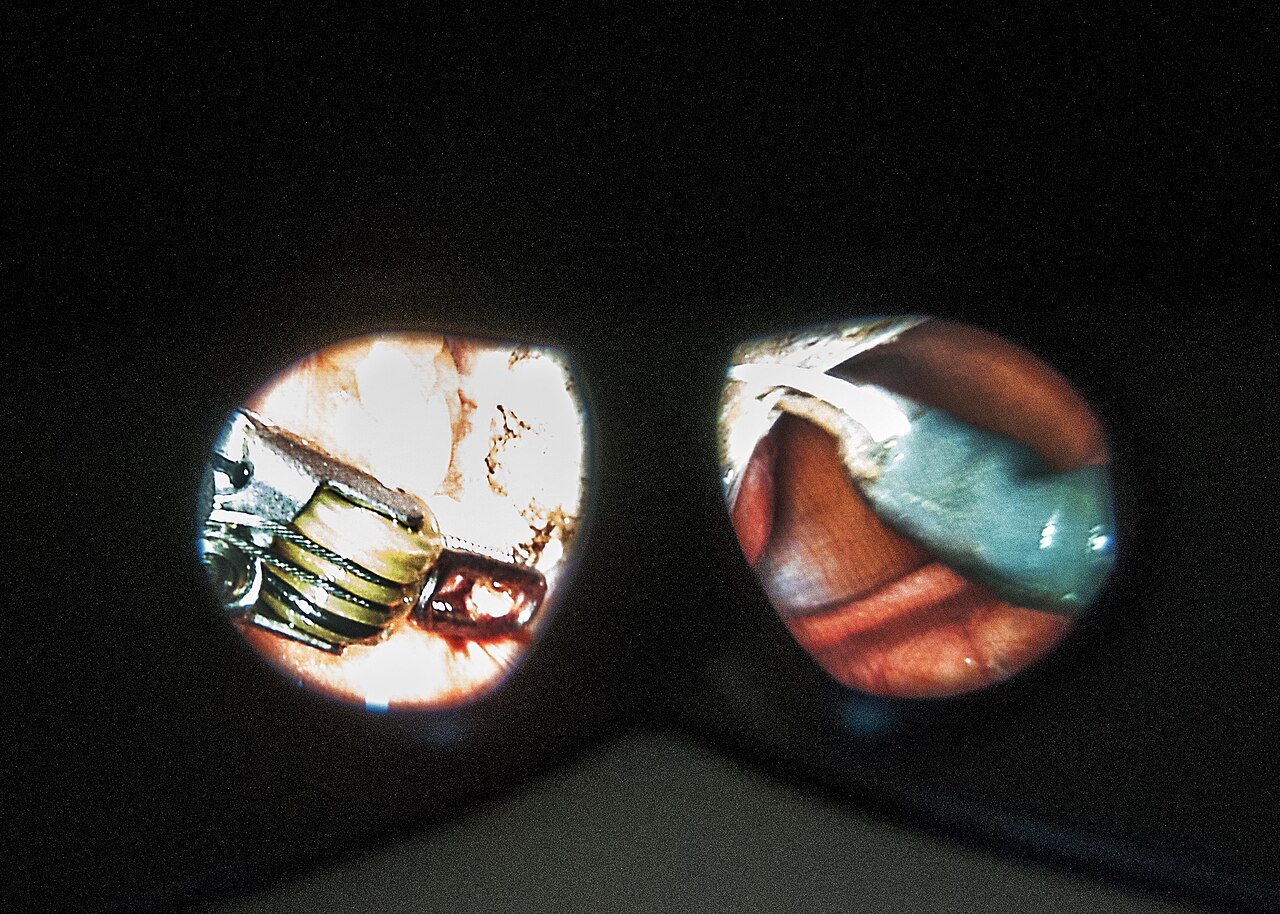
- Vision : caméra stéréoscopique 3D haute définition (10-12x), immersion totale dans le champ opératoire, fluorescence ICG intégrée (Firefly).